Hey, I'm Cheng.
Geomatics engineer with 5+ years of experience in GNSS positioning and multi-sensor fusion. Passionate about AI, space technology, and the future of autonomous navigation.
I hold an M.Sc. in Geomatics Engineering from the University of Calgary, where my thesis on visual-inertial-wheel odometry was published at ION GNSS+. When I'm not analyzing positioning data, you'll find me exploring alpine trails and capturing the journey through photography.

Technical Expertise
GNSS / RTK / PPP
Satellite positioning, correction services, high-precision navigation, multi-constellation integration
Sensor Fusion / INS
IMU integration, visual-inertial odometry, Kalman filtering, multi-sensor navigation systems
Software Development
C++, Python, RTKLIB, OpenCV, algorithm implementation, real-time systems
Featured Research
Robust Wheel-Aided Visual-Inertial Odometry for Winter Navigation
Solving GPS-denied navigation in urban canyons and harsh Canadian winters. Achieved 98.8% error reduction (150.6m → 1.8m) using tightly-coupled MSCKF with wheel odometry.
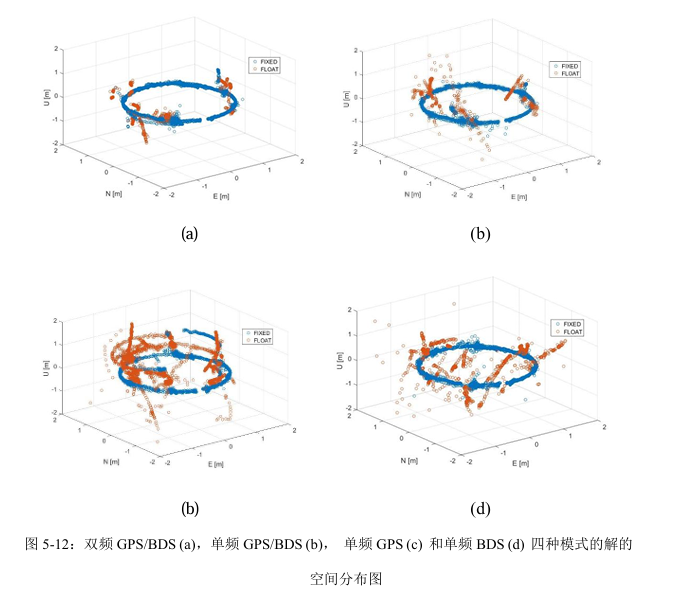
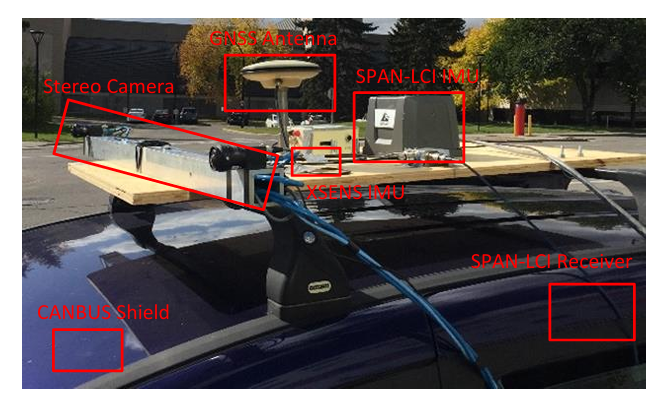
Single-Frequency GPS/BDS Short-Baseline Attitude Determination
Achieving sub-degree accuracy with low-cost single-frequency receivers. Reached 96.1% fix rate (vs 70.4% GPS-only) and 0.88° yaw accuracy using baseline-constrained LAMBDA.